Robot Operating System (ROS)
The de facto framework for robot application development
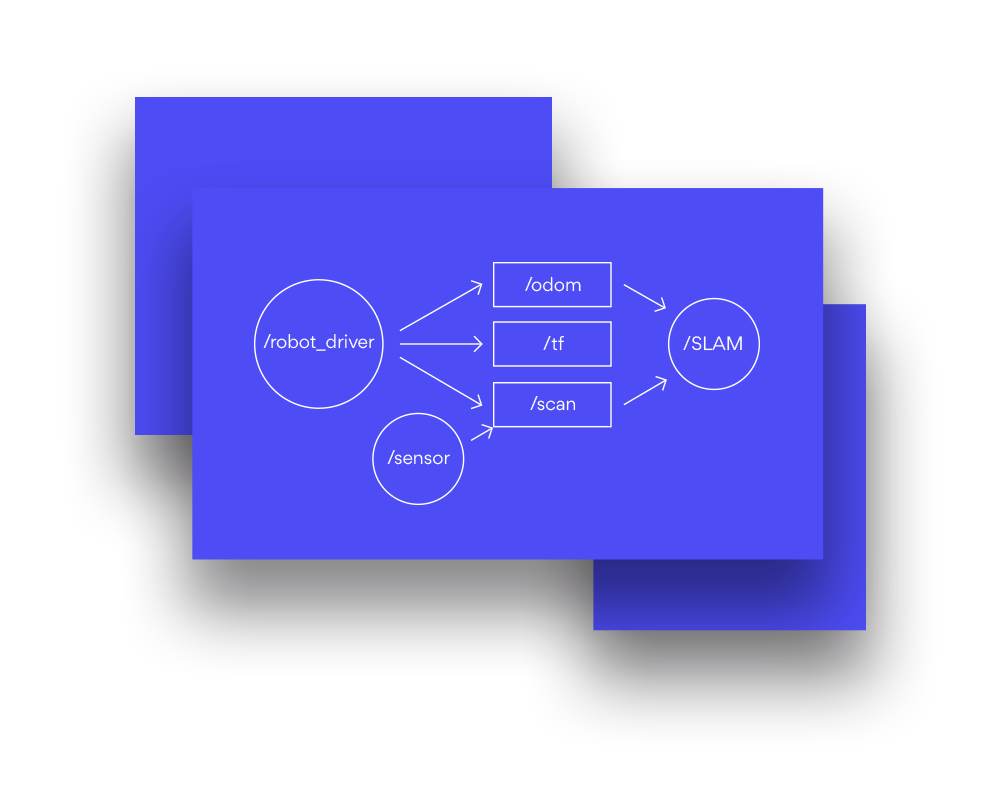
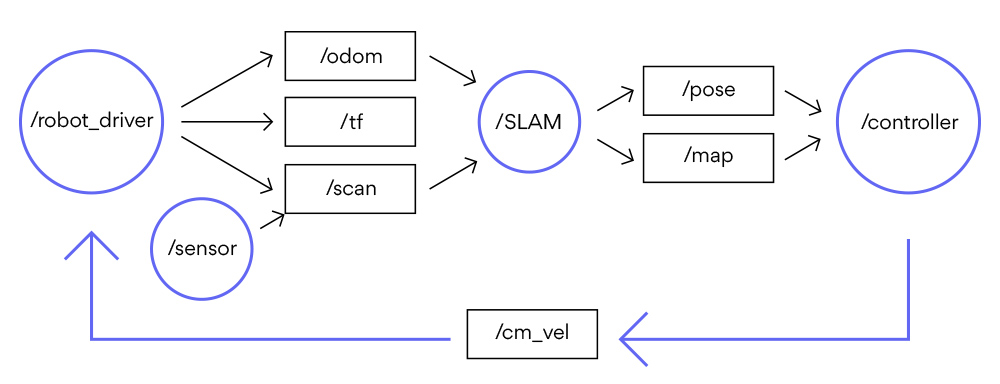
ROS is the common language roboticists use to build robots. It's an open source and modular set of software libraries and tools that help you build robot applications. It provides a message-passing system between software components, drivers for robot hardware, state-of-the-art robotic algorithms, and powerful developer tools to test, debug and visualize your robot.