Our mission
Faster robots. Customized brains for robots
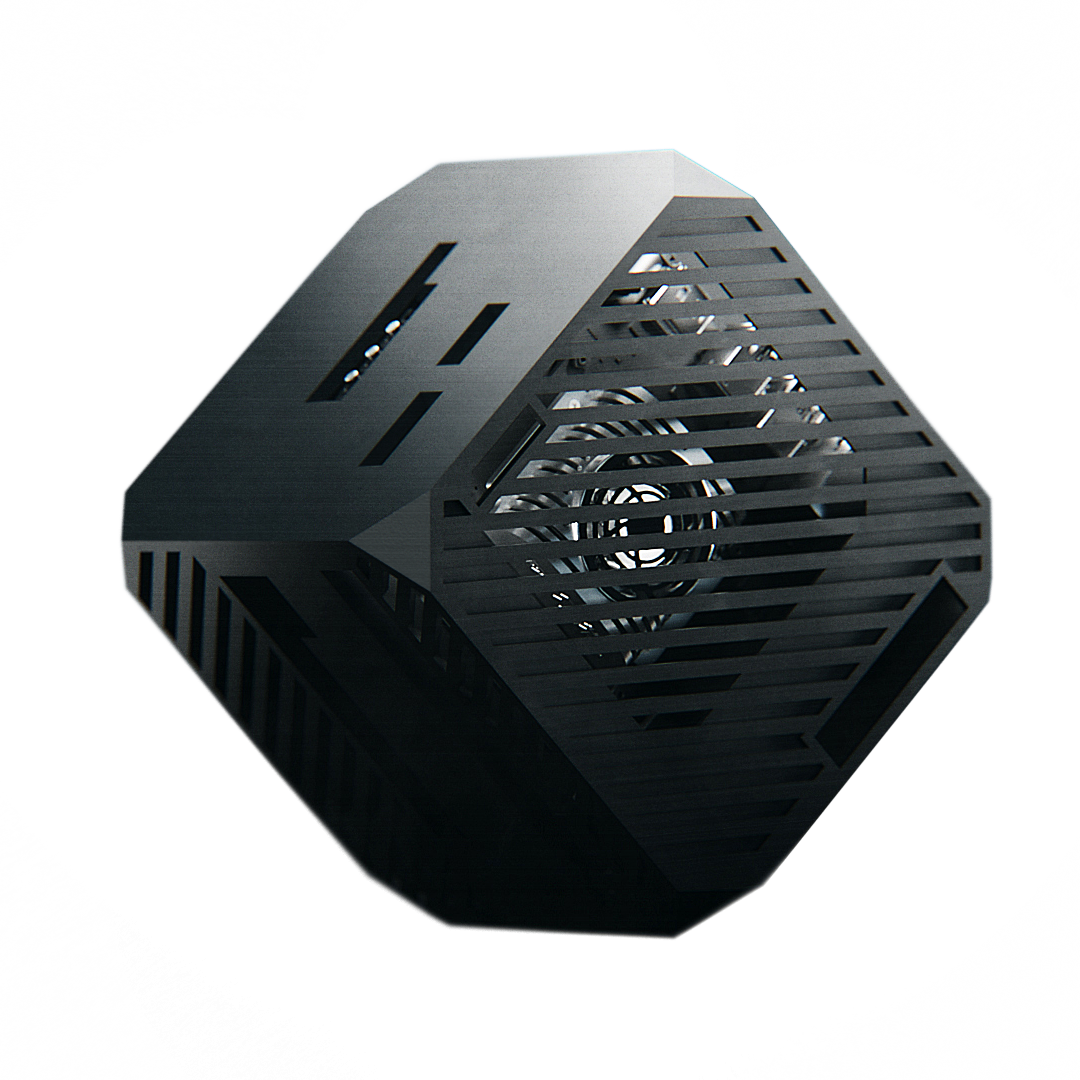
Acceleration Robotics is a firm focused on designing customized hardware, or “hardware brains”, that speed up a robot's operation. Shortly, we help make robots in industry move faster. In particular, the company creates custom compute architectures for high performance robots through hardware acceleration solutions (CPU, FPGAs, GPUs and combinations).
Autonomous Mobility
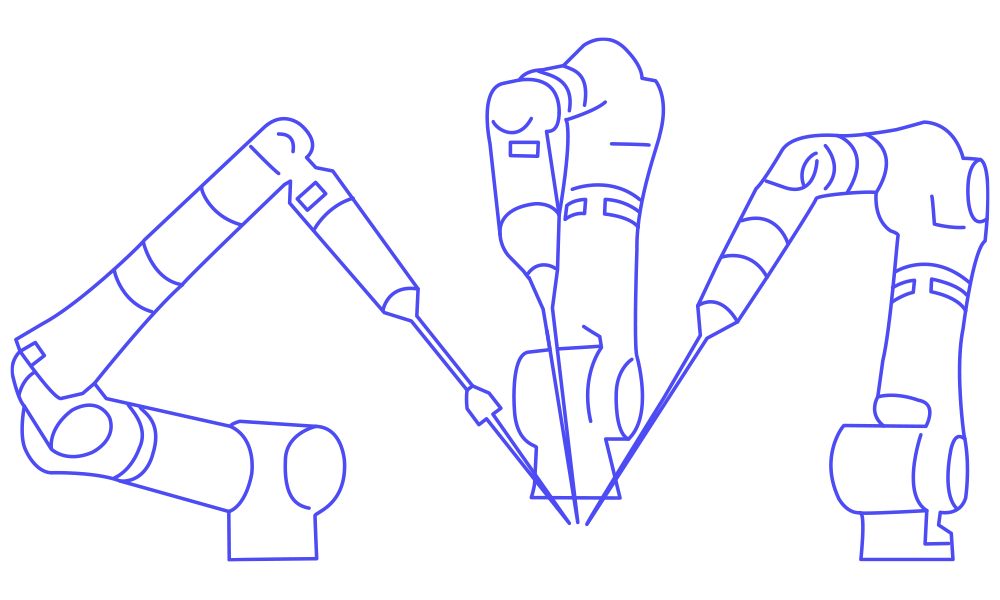
Industrial Manipulators